![]() CLPOS
CLPOS
|
|
Top |
|
Instrucción dedicada al posicionamiento, de ejecución condicional. Disponible en CP121 BIOS 2.63, CP122 BIOS 2.12, CP123 BIOS 2.22 Salvo otra indicación, la salida es la 1ª (q0.0).
Ejemplo:
LD 1
;Permiso de ejecución La instrucción requiere un espacio de 21 variables contiguas. Este es el bloque de variables, y como argumento de la instrucción se le pasa la primera (Ps_Act). Variables Estas son las variables requeridas:
Tabla 1 La variable denominada p_Indic tiene asignada una función a cada bit:
Tabla 2 Características La instrucción es condicional, es decir, se ejecuta cuando el el acumulador tiene valor 1. Pero aunque el acumulador tenga valor 0 igualmente tomará control de la salida asignada. Se le pueden asignar tres salidas:
Mediante los bits de p_Indic se hace esta selección, y es posible asignarle ambas salidas analógicas simultáneamente. Con cualquier salida analógica que se asigne, automáticamente se libera la salida de pulsos. Es posible tener hasta tres instrucciones CLPOS en un programa asignando una salida distinta a cada una.
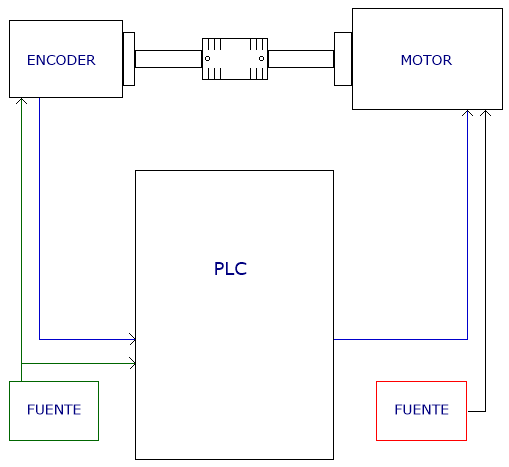
Uso
Figura 1 Primero se deben declarar las variables en el orden y tipo indicados en la tabla 1. Los nombres quedan a gusto del usuario. Los parámetros Pl_RIni y Pl_RFin se hallan experimentalmente. Se comienza con valores altos y se van reduciendo hasta legrar el mejor resultado. t_PDesc debe ser inicialmente el mas grande posible (32767), y luego ajustarlo acorde al tiempo medido. Si este tiempo es menor a lo que se tarda en llegar, entonces se detendrá antes de llegar. Para anularlo se le asigna valor -1. Mx_Sal corresponderá a la velocidad máxima. Mn_Sal es la velocidad mínima, y no debería ser menor que 1. Una vez que se han establecido los parámetros se da marcha seteando el bit _exe. Una vez que se ha alcanzado la posición este bit debe ser reseteado para poder asignar nueva posición o parámetros. Para detener se puede resetear este bit en cualquier momento. Lo mismo sucederá si al momento de ejecutar la instrucción el acumulador tiene 0. El bit _Sing debe ser leído y copiado a una salida, pues es la indicación de dirección. Es necesario que se ejecute permanentemente la instrucción para que se refresque el valor de salida acorde a la posición leída del encoder. Para recuperar el control de la salida que se le haya asignado, simplemente hay que dejar de ejecutar la instrucción.
Ejemplo
en instrucciones
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||